Sudedamo dviračio tiuningas: 22 km/h į 40 km/h
Kaip jau minėjau čia ir čia, 22 km/h yra kiek mažoka važinėjant didesniais atstumais, ilgu lygiu keliu. Visai logiška būtų tą greitį didinti… Manau tinkamas greitis būtų maždaug dvigubas, apie 40 km/h. Būdų yra net keli, vieni paprastesni, kiti sudėtingesni: galima kelti akumuliatoriaus įtampą, dėti didesnį ratą, keisti motorą į greitesnį, užankstinti motoro fazę…
Akumuliatoriaus įtampą galima pakelti perjungiant celes. Šiuo metu akumuliatoriaus konfigūracija yra 10s4p, taigi galima būtų pakeisti į 20s2p. Deja tai iškelia gana dideles šalutines problemas: reikia naujo, gan brangaus ir didelio BMS/PCM, reikia naujo įkroviklio arba stipriai modifikuoti esamą, reikia naujo ir brangaus motoro valdiklio arba stipriai modifikuoti esamą… Per daug bėdų, būdas nelabai tinkamas.
Didesnį ratą nėra kur kišti, o ir vaizdas būtų baisus. Naujo motoro irgi teko atsisakyti dėl aukštos kainos, ilgo laukimo laikotarpio, o taip pat ir paprasčiausio pasirinkimo stokos, mat tokiam greičiui/įtampai jų kinai nekepa masiškai.
Motoro fazės užankstinimas būtų neįmanomas su esamu valdikliu, taigi reikėtų jį keisti į kažką labai mandro. Tokios galios valdiklių neteko matyti su lanksčiai ir patikimai valdomu fazės kampu. Kita vertus tai maksimalų greitį padidintų gal tik +50%.
Motoro modifikacija
Bet  yra dar vienas variantas… Motoro apvijų pervyniojimas ar modifikavimas. Pervynioti yra gana didelis ir brangus darbas, tačiau modifikavimas skamba jau geriau. Taigi, laikas ardyti ir skųstis kinų kokibe… Aišku viena iš bėdų ta, kad norint nuimti galinį ratą reikia ir atjungti laidus, o kad tai padaryti, reikia ardyt elektronikos dėžutę. Laidai prakišti per gan mažas skyles, taigi reikia ardyti ir holo sensorių jungtį, kadangi ji visa nepratelpa. Šioks toks nepatogumas… Nors kita vertus, atsižvelgiant į kitus kiniškus stebuklus, elektronika sukišta gana tvarkingai: plastikiniame dėžutės dangtelyje yra išlieti valdiklio formą atitinkantys laikikliai, laidai kompaktiškai pritvirtinti, taigi atsukus 4 varžtus (nerūdijančio plieno !!) ir nuėmus dangtelį, viskas gražiai išgriūna.
yra dar vienas variantas… Motoro apvijų pervyniojimas ar modifikavimas. Pervynioti yra gana didelis ir brangus darbas, tačiau modifikavimas skamba jau geriau. Taigi, laikas ardyti ir skųstis kinų kokibe… Aišku viena iš bėdų ta, kad norint nuimti galinį ratą reikia ir atjungti laidus, o kad tai padaryti, reikia ardyt elektronikos dėžutę. Laidai prakišti per gan mažas skyles, taigi reikia ardyti ir holo sensorių jungtį, kadangi ji visa nepratelpa. Šioks toks nepatogumas… Nors kita vertus, atsižvelgiant į kitus kiniškus stebuklus, elektronika sukišta gana tvarkingai: plastikiniame dėžutės dangtelyje yra išlieti valdiklio formą atitinkantys laikikliai, laidai kompaktiškai pritvirtinti, taigi atsukus 4 varžtus (nerūdijančio plieno !!) ir nuėmus dangtelį, viskas gražiai išgriūna.
Pirma  bėda: kad nuimti motoro dangtelį (jis tik iš vienos pusės), reikia nuimti stabdžių diską. Pastarasis yra prisuktas su iš varškės pagamintais varžtais, ypatingai žema kryžmine galvute. Maža to, varžtai užpilti kažkokiais klijais, o kad ir to nebūtų maža, sriegis užpiltas raudonu loktaitu. Matyt dėjo visas pastangas kad neišsiardytų važiuojant… Bet rezultatas toks, kad atsukti civilizuotais metodais buvo neįmanoma, taigi teko visus varžtus pritaikyti stambiam plokščiam atsuktuvui. Visi atsisuko, tik ne visi pilnai. Dviejų galvutės tiesiog nusisuko ir sriegis pasiliko motoro korpuse. Reiks tai kažkaip spręsti… Kad geriau įsivaizduotumėt, “plieniniai” varžtai tokio minkštumo, kaip minkštas aliuminis.
bėda: kad nuimti motoro dangtelį (jis tik iš vienos pusės), reikia nuimti stabdžių diską. Pastarasis yra prisuktas su iš varškės pagamintais varžtais, ypatingai žema kryžmine galvute. Maža to, varžtai užpilti kažkokiais klijais, o kad ir to nebūtų maža, sriegis užpiltas raudonu loktaitu. Matyt dėjo visas pastangas kad neišsiardytų važiuojant… Bet rezultatas toks, kad atsukti civilizuotais metodais buvo neįmanoma, taigi teko visus varžtus pritaikyti stambiam plokščiam atsuktuvui. Visi atsisuko, tik ne visi pilnai. Dviejų galvutės tiesiog nusisuko ir sriegis pasiliko motoro korpuse. Reiks tai kažkaip spręsti… Kad geriau įsivaizduotumėt, “plieniniai” varžtai tokio minkštumo, kaip minkštas aliuminis.
Diską nuimti pavyko. Antra bėda: dangtelis prisuktas 6 varžtais su, irgi, mažomis kryžminėmis galvutėmis. Sriegiai irgi užklijuoti. Šiaip taip, panaudojant įvairius nestandartinius įrankius, atsukti pavyko. Du varžtai sugadinti visiškai. Būtų smulkmė jei sriegis nebūtų colinis: matmuo kažkur tarp M3 ir M4, sriegis kiek didesnio žingsnio. Kadangi operavau sekmadienį ir tokių varžtų nebuvo įmanoma įsigyti, teko tiesiog prasriegti motoro korpusą M4 sriegiu.
Viduje radau gana neblogai atrodantį motorą:



Dantračių jau tikėjausi plastmasinių, taigi labai neišgąsdino. Pagrindinė priežastis naudoti plastmasę – kaina, tačiau tai galima argumentuoti mažesniu svoriu ir žemesniu triukšmo lygiu. Nors, triukšmo lygis vis tik yra per didelis, dantračiai pernelyg zvimbia. Šituos yra gana lengva prasukti, taigi, jei kada forsuosiu toliau, reikės keisti visus dantračius į metalinius sraigtinius (persuktais dantim), kad padidėtų potencialus sukimo momentas ir sumažėtų triukšmas. Beje, trečioje nuotraukoje matomas didelis plieninis diskas yra vienkryptė sankaba, kuri atjungia motorą riedėjimo metu. Tai yra būtinas komponentas lėtaeigei transporto priemonei, kadangi riedant nuo kalno greičiau nei maksimalus greitis (>22km/h) motoras imtų regeneruoti ir galėtų pažeisti akumuliatorių. Trūkumas kad regeneracinis stabdymas tampa neįmanomu.  Jei šis tiuningas pavyks ir dviratukas sava eiga galės lėkti greičiau, šią sankabą galėsiu užblokuoti ir įgalinti regeneracijos funkciją.
Jei šis tiuningas pavyks ir dviratukas sava eiga galės lėkti greičiau, šią sankabą galėsiu užblokuoti ir įgalinti regeneracijos funkciją.
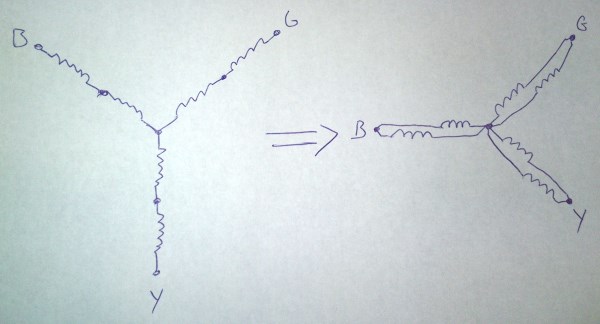
Apžiūrėjus apvijas paaiškėjo kad man pasisekė: kiekviena fazė susideda iš dviejų dalių: apsuka tris statoriaus dantis, keliauja į priešingą statoriaus pusę, apsuka dar tris dantis ir jungiasi į bendrą neutralų fazių tašką. Tiesa, statorius turi 18 dantų, apvijos jungtos žvaigžde. Žemiau pavaizduotas užmanymas, ką daryti, kad greitis padvigubėtų. Kiekviena fazė gaunasi tarsi dvi nuosekliai sujungtos apvijos, taigi galima tiesiog perkirpti tas apvijas ir sujungti lygiagrečiai. Greitis (be apkrovos) padvigubėja, tačiau dvigubai sumažėja sukimo momentas. Šią bėdą spręsiu vėliau…
Pacientas buvo išoperuotas pagal pateiktą schemą ir sutvarstytas, dabar atrodo taip:

Valdiklio modifikacija
Dvigubai sumažėjusį sukimo momentą reikia kažkaip kompensuoti. Tiksliau ne kažkaip, o dvigubinant fazinę srovę. Tam teks ardyti valdiklį… Pastarasis, beje, atrodo taip:



Trečioje nuotraukoje, kairiame apatiniame kampe matosi rezistoriaus simboliu pažymėtas srovės matavimo šuntas. Norint padidinti ribojamą srovę, šį šuntą reikia mažinti proporcingai. Mano matavimo prietaisas rodo, kad šunto varža yra 5mΩ. Prieš modifikavimą pagreičio pakako, tačiau jis buvo vos-vos mažesnis nei draugės dviratuko (aš sunkesnis), taigi srovės didinimo koeficientą padarykim ne k=2, bet, tarkim, k=2.2. Tai gaunasi kad reikalinga šunto varža R = R0/k = 0.005/2.2 = 2.3 mΩ. Tai galima pasiekti lygiagrečiai šuntui prilituojant papildomą varžą. Bendros varžos formulė yra R = R0*R1/(R0+R1), tai R1 = R0*R/(R0-R) = 4.2 mΩ. Tokių rezistorių po ranka neturiu, tai tiesiog imu gabalą laido, matuodamas paderinu jo ilgį ir prilituotu lygiagrečiai šuntui. Suprantu kad vario šiluminis koeficientas yra gana baisus, tačiau šiuo atveju tokio didelio tikslumo nereikia. Plius, teigiamas koeficientas šiuo atveju gaunasi kaip šiokia-tokia perkaitimo apsauga (nes didėjant šunto temperatūrai didėja jo varža, dėl ko mažėja valdiklio srovė ir mažėja kaitimas).
Žinoma, prieš operaciją peržiūrėjau viso valdiklio struktūrą ir įvertinau jo galimybes atlaikyti didesnę srovę. Prieš tai darbinė srovė buvo ribojama ties 12A, o nuo šiol bus 26A. Valdiklyje sumontuoti lauko tranzistoriai RU6888B, kurių darbinė srovė yra apie 70A. Kadangi valdiklis riboja ne fazės, bet akumuliatoriaus srovę, tai kelia šiek tiek susirūpinimo, kadangi tokią srovę apatinio peties tranzistoriai matys jau prie 30% PWM. Bet viliuosi kad valdiklio firmwaras parašytas protingai ir tokį režimą tranzistoriai matys tik labai trumpais impulsais.
Rezultatas
Na, važiuoja. Prasukom apie 5km aplink namus ir dar nenusprogo niekas. Dabar abu dviratukai bėgėjasi praktiškai identiškai iki kol draugės pasiekia ~22 km/h ir nusistovi ties 24km/h, o maniškis bėgėjasi toliau, kol pasiekia maksimalų greitį ~37 km/h. Kieme jau užtenka… :) Šiandien pranašavo lietų, tai į darbą nevažiavau ir įspūdžių iš ilgesnės kelionės neturiu. Gal ryt-poryt…
Jei daryti normaliai, reikėtų keisti valdiklį į tokį, kuris turi normalų fazės srovės valdymą (ne pagal akumuliatoriaus srovę). Taipogi prie tokio greičio jau prasmės turi regeneracinis stabdymas. Tai praktiškai vienintelis rinkoje egzistuojantis Kelly valdiklis tiktų idealiai. Ir prie viso to jis turi sinchroninį lyginimą ir tiesioginį srovės, o ne įtampos valdymą akceleratoriumi bei rankenėle reguliuojamo stiprumo regeneraciją.


Hi Šarūnas,
Sorry that I write you in English but I do not understand “Lituano” language.
I follow your blog now and then using google translator and I find it very good and interesting.
Yesterday I found this post and I thought that will be good to put in common with you one idea that crossed my mind about a year ago and it is related to what you comment here.
I post it on Endless-ephere forum here: link and DIYelectic car forum here: link.
Summarizing is to do what you have done to this motor but that the configuration from parallel to series windings could be done on the fly, so you will have a low KV motor for low speeds and a high KV motor for high speed with the click of a switch or by a programing on the controller…
Here is a picture of what I mean for one of the motor phases: link.
Let me me know what you think
You can contact me by e-mail.
Gonzalo
Hi Gonzalo,
English is not a problem here. Our country is very small and we had to learn English to survive. :)
Reconnecting windings on the fly is not a new things, there were several such projects on ES and other forums. There is one thing to note: not all motors work well in ∆ (delta) connection due to non-sinewave BEMF. So before doing so, measure losses in such connection. I think a more proper way to do such gearing would be to split windings in two pieces (like I did here) and then switch them to series/parallel with contactors. Some folks were able to find a small ones to fit inside the hub.
My email is: sarunas at e-motion dot lt
I know there is many tries of doing a switch from ∆ to Y but what I mean is about switching from a series to a parallel winding as you did here but on the fly.
Obviously has to be done on a pair winding motor so it will be possible to ha ve a 4/2 turns motor or 10/5, 8/4, 6/3, etc.
Sorry for the duplication, last message is the correct one…
Switching serial/parallel is just as easy as Y/∆, you just need some relays/contactors and wiring. The only problem is to fit everything inside the hub, because there will be many wires coming out and it will be next to impossible to fit them all in one axle and still have good current.
Yes, all that cables is an issue to take in account, actually probably will require modifications or new motor design.
I do not see so much benefit to switch Y/∆ as I see on switching serial/parallel, any way I have not done tests yet, tomorrow I am going to discuss about it to our investigation group at the University and will see if we decide to do a proper study about it.
Will keep you informed.
OK, please let me know how that goes. :)
[quote quote=13015]Kadangi valdiklis riboja ne fazės, bet akumuliatoriaus srovę, tai kelia šiek tiek susirūpinimo, kadangi tokią srovę apatinio peties tranzistoriai matys jau prie 30% PWM. [/quote]
Kaip tas dalykas paskaičiuojamas? Nes kaip suprantu sukimo momentas priklauso nuo fazinės srovės, o valdiklis tai baterijos srovę riboja. Tai kokia ta fazinė kada būna?
Baterijos srovė = fazės srovė * PWM plotis
Viršutinio tranzistoriaus srovė RMS = baterijos srovė
Viršutinio tranzistoriaus pikinė srovė = baterijos srovė / PWM plotis
Apatinio tranzistoriaus srovė RMS = viršutinio tranzistoriaus pikinė srovė * PWM plotis
Regis kažkaip taip, jei kažkur skubėdamas nesuklydau. PWM plotis matuojamas 0-1 ribose.
Dėkui. Bandau dar ir endless-sphere.com diskusijas ta tema skaityti, kad visiškai aišku būtų. O aš galvojau ko chebra dėl svylančių fazinių laidų baiminasi, kai pats su 35A baterijos srove ir 4mm2 faziniais važinėju ir problemų nebuvo. Pasirodo ir pas mane faziniais 100A srovė kartais palaksto.
na amperai nėra tiesiogiai atsakingi už laidų kitos elektronikos išgarinimą, labiau Džiauliai:D tai maždaug susiveda į amperus, varžą, laiką ir kiek pats laidininkas sugeba atsikratyt šilumos per laiko vienetą
Tie valdikliai stebi baterijos srovę ir pagal PWM plotį bando išsiskaičiuoti kokia bus fazės srovė. Prie mažo PWM pločio tai padaryti tampa gana nelengva, todėl ankstesnės kartos valdikliai šaudydavo… Dabar piguvos gamintojai jau kažkiek pramoko su tuo susitvarkyt: PWM didina lėčiau, baterijos srovę apriboja prie mažo PWM ir t.t. Bet rezultate vis tiek pasitaiko fejerverkų. Iš dalies ir dėl to, kad naudoja bukas diskrečias FETų draivinimo grandines, kurios yra gana lėtos ir dalį laiko FETai dirba tiesiniame režime (ypač prie labai mažo duty cycle).